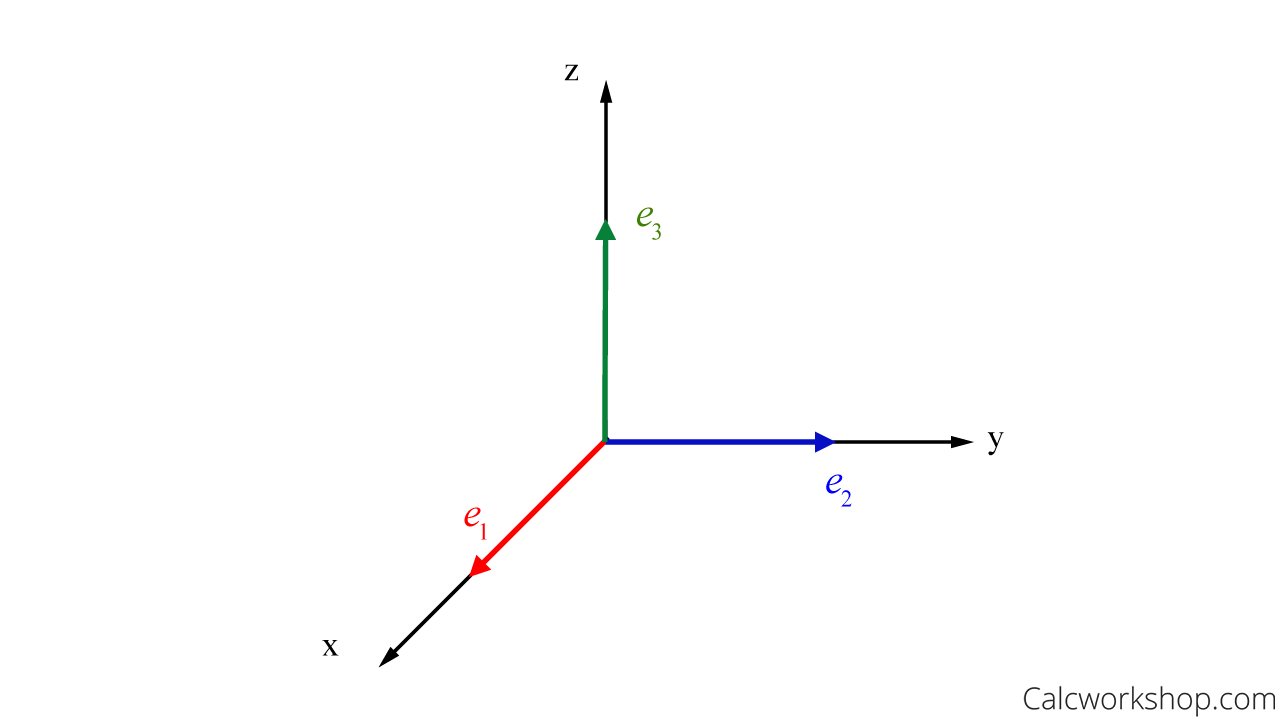
Standard Basis Vectors I And J . This video explains how to write vectors using i hat, j hat, and k hat notation, where i, j, and k are the standard basis vectors (standard unit vectors). A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single nonzero entry with. H = r4 is e1 = 1; E 1 = 1 0 , e 2 = 0 1. 3d standard basis vectors are introduced along with their notation (i, j and k), algebraic and. The standard basis in the quaternion space is. The kernel of a n m matrix a is the set ker(a) = fx 2 rm j ax =. The standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular):
from calcworkshop.com
This video explains how to write vectors using i hat, j hat, and k hat notation, where i, j, and k are the standard basis vectors (standard unit vectors). The standard basis in the quaternion space is. E 1 = 1 0 , e 2 = 0 1. H = r4 is e1 = 1; 3d standard basis vectors are introduced along with their notation (i, j and k), algebraic and. A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single nonzero entry with. The standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): The kernel of a n m matrix a is the set ker(a) = fx 2 rm j ax =.
Basis of Vector Spaces (A Linear Algebra Guide)
Standard Basis Vectors I And J This video explains how to write vectors using i hat, j hat, and k hat notation, where i, j, and k are the standard basis vectors (standard unit vectors). The kernel of a n m matrix a is the set ker(a) = fx 2 rm j ax =. This video explains how to write vectors using i hat, j hat, and k hat notation, where i, j, and k are the standard basis vectors (standard unit vectors). 3d standard basis vectors are introduced along with their notation (i, j and k), algebraic and. The standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): H = r4 is e1 = 1; A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single nonzero entry with. E 1 = 1 0 , e 2 = 0 1. The standard basis in the quaternion space is.
From www.youtube.com
Vectors i and j notation YouTube Standard Basis Vectors I And J 3d standard basis vectors are introduced along with their notation (i, j and k), algebraic and. The standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): H = r4 is e1 = 1; The standard basis in the quaternion space is. The kernel of a n m matrix a is the set ker(a) = fx 2. Standard Basis Vectors I And J.
From www.youtube.com
12.2 Part 7/8 Quick Introduction to Standard Basis Vector & Unit Standard Basis Vectors I And J The standard basis in the quaternion space is. H = r4 is e1 = 1; The kernel of a n m matrix a is the set ker(a) = fx 2 rm j ax =. A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single nonzero entry with. This. Standard Basis Vectors I And J.
From www.slideserve.com
PPT Fun with Vectors PowerPoint Presentation, free download ID3127161 Standard Basis Vectors I And J The standard basis in the quaternion space is. E 1 = 1 0 , e 2 = 0 1. H = r4 is e1 = 1; A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single nonzero entry with. This video explains how to write vectors using i. Standard Basis Vectors I And J.
From en.wikipedia.org
Standard basis Wikipedia Standard Basis Vectors I And J H = r4 is e1 = 1; E 1 = 1 0 , e 2 = 0 1. 3d standard basis vectors are introduced along with their notation (i, j and k), algebraic and. The kernel of a n m matrix a is the set ker(a) = fx 2 rm j ax =. The standard basis in the quaternion space. Standard Basis Vectors I And J.
From www.youtube.com
Standard Basis Vectors i, j, k YouTube Standard Basis Vectors I And J H = r4 is e1 = 1; E 1 = 1 0 , e 2 = 0 1. A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single nonzero entry with. The standard basis in the quaternion space is. 3d standard basis vectors are introduced along with their. Standard Basis Vectors I And J.
From zief0002.github.io
Chapter 16 Basis Vectors and Matrices Matrix Algebra for Educational Standard Basis Vectors I And J The kernel of a n m matrix a is the set ker(a) = fx 2 rm j ax =. This video explains how to write vectors using i hat, j hat, and k hat notation, where i, j, and k are the standard basis vectors (standard unit vectors). E 1 = 1 0 , e 2 = 0 1. A. Standard Basis Vectors I And J.
From www.slideserve.com
PPT Vectors PowerPoint Presentation, free download ID568692 Standard Basis Vectors I And J E 1 = 1 0 , e 2 = 0 1. This video explains how to write vectors using i hat, j hat, and k hat notation, where i, j, and k are the standard basis vectors (standard unit vectors). The standard basis in the quaternion space is. 3d standard basis vectors are introduced along with their notation (i, j. Standard Basis Vectors I And J.
From www.slideserve.com
PPT Sec 13.1 The ThreeDimensional Coordinate System PowerPoint Standard Basis Vectors I And J 3d standard basis vectors are introduced along with their notation (i, j and k), algebraic and. This video explains how to write vectors using i hat, j hat, and k hat notation, where i, j, and k are the standard basis vectors (standard unit vectors). The standard basis in the quaternion space is. A standard basis, also called a natural. Standard Basis Vectors I And J.
From www.youtube.com
Obtain the Unit Vector from a Vector. Standard Basis Vectors i,j,k Standard Basis Vectors I And J H = r4 is e1 = 1; A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single nonzero entry with. The standard basis in the quaternion space is. The kernel of a n m matrix a is the set ker(a) = fx 2 rm j ax =. This. Standard Basis Vectors I And J.
From www.chegg.com
Solved The unit vectors in V3 that coincide with the Standard Basis Vectors I And J This video explains how to write vectors using i hat, j hat, and k hat notation, where i, j, and k are the standard basis vectors (standard unit vectors). The standard basis in the quaternion space is. E 1 = 1 0 , e 2 = 0 1. The kernel of a n m matrix a is the set ker(a). Standard Basis Vectors I And J.
From www.chegg.com
Solved Let S = {e1, e2, e3} be the standard basis for the Standard Basis Vectors I And J H = r4 is e1 = 1; The kernel of a n m matrix a is the set ker(a) = fx 2 rm j ax =. This video explains how to write vectors using i hat, j hat, and k hat notation, where i, j, and k are the standard basis vectors (standard unit vectors). E 1 = 1 0. Standard Basis Vectors I And J.
From www.geogebra.org
Putting Standard Basis Vectors to Work GeoGebra Standard Basis Vectors I And J E 1 = 1 0 , e 2 = 0 1. The kernel of a n m matrix a is the set ker(a) = fx 2 rm j ax =. A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single nonzero entry with. H = r4 is e1. Standard Basis Vectors I And J.
From www.slideserve.com
PPT Fundamentals of Engineering Analysis EGR 1302 Unit Vectors and Standard Basis Vectors I And J E 1 = 1 0 , e 2 = 0 1. This video explains how to write vectors using i hat, j hat, and k hat notation, where i, j, and k are the standard basis vectors (standard unit vectors). The standard basis in the quaternion space is. A standard basis, also called a natural basis, is a special orthonormal. Standard Basis Vectors I And J.
From calcworkshop.com
Basis of Vector Spaces (A Linear Algebra Guide) Standard Basis Vectors I And J H = r4 is e1 = 1; The standard basis vectors are \(\textit{orthogonal}\) (in other words, at right angles or perpendicular): The standard basis in the quaternion space is. This video explains how to write vectors using i hat, j hat, and k hat notation, where i, j, and k are the standard basis vectors (standard unit vectors). A standard. Standard Basis Vectors I And J.
From www.slideserve.com
PPT Linear Algebra Review PowerPoint Presentation, free download ID Standard Basis Vectors I And J 3d standard basis vectors are introduced along with their notation (i, j and k), algebraic and. E 1 = 1 0 , e 2 = 0 1. The kernel of a n m matrix a is the set ker(a) = fx 2 rm j ax =. The standard basis in the quaternion space is. The standard basis vectors are \(\textit{orthogonal}\). Standard Basis Vectors I And J.
From www.youtube.com
L1 8 Standard Basis Vectors YouTube Standard Basis Vectors I And J A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single nonzero entry with. This video explains how to write vectors using i hat, j hat, and k hat notation, where i, j, and k are the standard basis vectors (standard unit vectors). The kernel of a n m. Standard Basis Vectors I And J.
From vectorified.com
Basis Vector at Collection of Basis Vector free for Standard Basis Vectors I And J This video explains how to write vectors using i hat, j hat, and k hat notation, where i, j, and k are the standard basis vectors (standard unit vectors). The standard basis in the quaternion space is. 3d standard basis vectors are introduced along with their notation (i, j and k), algebraic and. The kernel of a n m matrix. Standard Basis Vectors I And J.
From calcworkshop.com
3D Vectors (Fully Explained w/ StepbyStep Examples!) Standard Basis Vectors I And J The kernel of a n m matrix a is the set ker(a) = fx 2 rm j ax =. E 1 = 1 0 , e 2 = 0 1. A standard basis, also called a natural basis, is a special orthonormal vector basis in which each basis vector has a single nonzero entry with. The standard basis vectors are. Standard Basis Vectors I And J.